2011:Mechanical 2 1.26: Difference between revisions
From 1511Wookiee
Jump to navigationJump to search
(New page: = Attendance = '''Start time: ''' '''End time: ''' '''Members present: ''' '''Members Attending Next Meeting: ''' = Tasks Completed = *task **sub-task **sub-task *task = Tasks In Pr...) |
Mechanical2 (talk | contribs) No edit summary |
||
| (5 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
= Attendance = | = Attendance = | ||
'''Start time: ''' | '''Start time: 6:30''' | ||
'''End time: ''' | '''End time:''' | ||
'''Members present: ''' | '''Members present:''' | ||
''' | '''Brianna M.''' | ||
'''Jake K.''' | |||
* | '''Jon G.''' | ||
** | |||
* | '''Ciana R.''' | ||
'''Alex W.''' | |||
'''Mr. K.''' | |||
'''Mr. W.''' | |||
'''Mrs W.''' | |||
'''Members Attending Next Meeting:''' | |||
= Tasks Completed = | |||
*Made list of parts needed to buy(Alex)<br> Made an inventor representation of scoring pegs (Jonathan)<br> Created a sprocket for the arm in inventor (Ciana) | |||
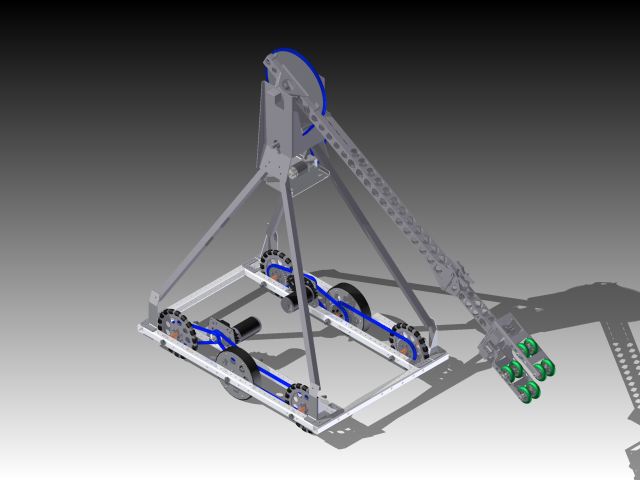
*Further refined upper structure (Alex) | |||
*[[Image:1-26-2011-1.jpg]] | |||
*[[Image:1-26-2011-2.jpg]] | |||
= Tasks In Progress = | = Tasks In Progress = | ||
* | *Determining (telescoping vs. folding) | ||
** | **does it work | ||
** | **realibility (prototype or design error) | ||
**how much force can it take? | |||
**how easy is it to reset | |||
**autonomous mode | |||
**speed, timing | |||
**how easy is it to fix | |||
**which one has the most play | |||
**release mechanism | |||
**speed of deployment | |||
*task | *task | ||
= Tasks to Complete = | = Tasks to Complete = | ||
* | *The Robot Frame Requirements include supporting (or interacting with) the following components;<br>1 shoulder<br>2 shoulder motor<br>3 drive train transmissions<br>4 bumpers<br>5 tusk pivot<br>6 tusk stops<br>7 protective skins<br>8 electrical board?<br>9 deployment mechanism<br>10 limit arm travel with a mechanical stop<br>11 Arm capture / release mechanism<br>12 arm travel limited by sensor<br>13 camera<br>14 yellow light<br>15 want it light<br><br>Not included;<br>1. electronic “belly pan”<br>2. battery case<br>3. main power switch<br>4. line following sensors<br>Materials Needed<br> | ||
* | *<br> | ||
= Materials Needed = | = Materials Needed = | ||
*task | *task | ||
**sub-task | **sub-task | ||
**sub-task | **sub-task | ||
*task | *task | ||
Latest revision as of 18:12, 26 January 2011
Attendance
Start time: 6:30
End time:
Members present:
Brianna M.
Jake K.
Jon G.
Ciana R.
Alex W.
Mr. K.
Mr. W.
Mrs W.
Members Attending Next Meeting:
Tasks Completed
- Made list of parts needed to buy(Alex)
Made an inventor representation of scoring pegs (Jonathan)
Created a sprocket for the arm in inventor (Ciana) - Further refined upper structure (Alex)



Tasks In Progress
- Determining (telescoping vs. folding)
- does it work
- realibility (prototype or design error)
- how much force can it take?
- how easy is it to reset
- autonomous mode
- speed, timing
- how easy is it to fix
- which one has the most play
- release mechanism
- speed of deployment
- task
Tasks to Complete
- The Robot Frame Requirements include supporting (or interacting with) the following components;
1 shoulder
2 shoulder motor
3 drive train transmissions
4 bumpers
5 tusk pivot
6 tusk stops
7 protective skins
8 electrical board?
9 deployment mechanism
10 limit arm travel with a mechanical stop
11 Arm capture / release mechanism
12 arm travel limited by sensor
13 camera
14 yellow light
15 want it light
Not included;
1. electronic “belly pan”
2. battery case
3. main power switch
4. line following sensors
Materials Needed
Materials Needed
- task
- sub-task
- sub-task
- task