2011:Electrical Main 1.29: Difference between revisions
From 1511Wookiee
Jump to navigationJump to search
(New page: = Attendance = '''Start time: ''' '''End time: ''' '''Members present: ''' '''Members Attending Next Meeting: ''' = Tasks Completed = *task **sub-task **sub-task *task = Tasks In Pr...) |
No edit summary |
||
| (4 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
= Attendance = | = Attendance = | ||
'''Start time: ''' | '''Start time: 10:30''' | ||
'''End time: ''' | '''End time:''' | ||
'''Members present: ''' | '''Members present: Dean S., Dave B., Dave S., Matthieu D., Vaughn ''' | ||
'''Members Attending Next Meeting: ''' | '''Members Attending Next Meeting:''' | ||
= Tasks Completed = | = Tasks Completed = | ||
* | *shortened mock electrical board - remounted components - attached mock board to drivetrain chassis | ||
* | *finished PWM cables on drive wheel encoders | ||
* | *finished battery holder design | ||
* | *connected new wireless radio on mock board | ||
= Tasks In Progress = | = Tasks In Progress = | ||
* | *Battery Holder | ||
**sub-task | *Main electrical Board | ||
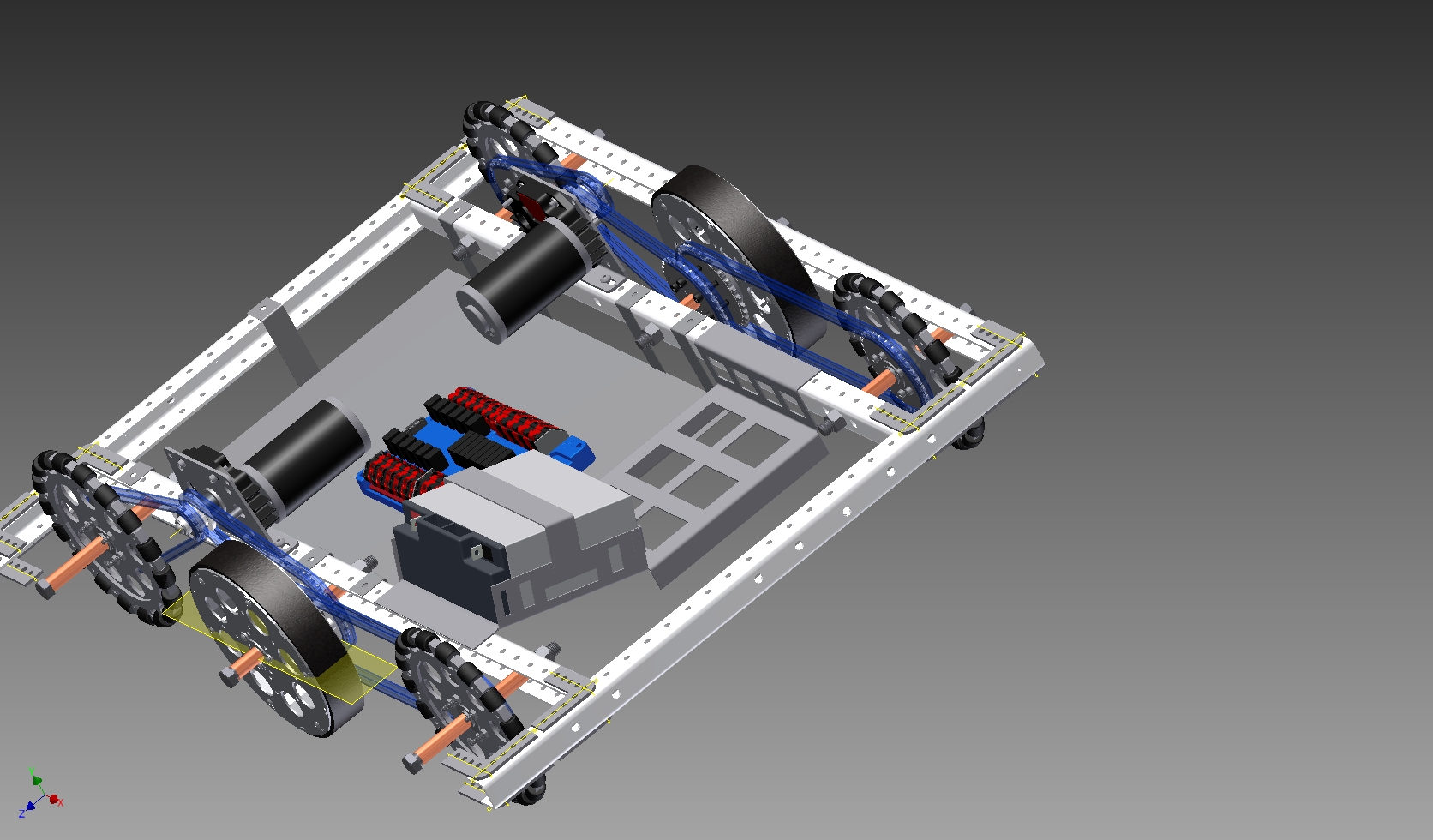
**sub-task | *[[Image:Robot_1_Mockup.jpg]] | ||
*<br> | |||
**sub-task | |||
**sub-task | |||
*task | *task | ||
= Tasks to Complete = | = Tasks to Complete = | ||
* | *install cables on drive motor encoders to digital sidecar so programmers can use for autonomous. | ||
* | *transfer line following sensors fron thunderfoot to new chassis. | ||
= Materials Needed = | = Materials Needed = | ||
*task | *task | ||
**sub-task | **sub-task | ||
**sub-task | **sub-task | ||
*task | *task | ||
Latest revision as of 17:20, 29 January 2011
Attendance
Start time: 10:30
End time:
Members present: Dean S., Dave B., Dave S., Matthieu D., Vaughn
Members Attending Next Meeting:
Tasks Completed
- shortened mock electrical board - remounted components - attached mock board to drivetrain chassis
- finished PWM cables on drive wheel encoders
- finished battery holder design
- connected new wireless radio on mock board
Tasks In Progress
- Battery Holder
- Main electrical Board
- sub-task
- sub-task
- task

Tasks to Complete
- install cables on drive motor encoders to digital sidecar so programmers can use for autonomous.
- transfer line following sensors fron thunderfoot to new chassis.
Materials Needed
- task
- sub-task
- sub-task
- task