2021:Power Cell Intake
Design Details:
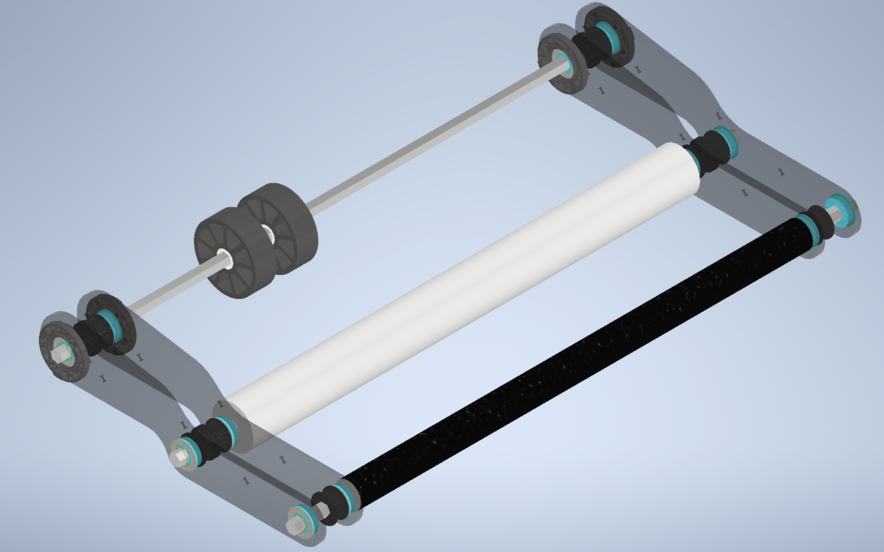
- Two roller system. One "Hot dog roller" which is a polycarb tube covered in a thin rubber material that grabs the balls and pulls them into the second roller, full of left, 3D Printed mecanum wheels that redirect the ball into a cut in the frame where they are indexed by a beam break sensor that counts the balls as the enter the robot. The handoff from the intake to the helix is two compliance wheels on the same axle as the pivot that pull the balls into the helix. The rollers are powered by a NEO 550 @ a 16:1 gear ratio and the pivot is powered by a NEO 550 motor @ a 100:1 gear ratio.
Prototyping 1/5/2020-1/11/2020
Overview: Based on initial team brainstorming and sketching, as well as theinformation from Strategy Subteam, we determined to prototype:
- An over-the-bumper intake:
- A thru-the-bumper intake
This decision is critical as it affects Drive Base!
- Test using various componenets touching the balls:
- Test brushes
- Test wheels
- Test "hot dog roll" - a material wrapped around a rod that grips the game piece well and will snag it.
- Test mecanum wheels to direct the balls into the robot in a manner that can be counted or indexed.
- Combinations
Observations: We observed the following over the course of prototyping:
- It is not difficult to get the balls to go over the bumper.
Decisions:
- Intake will pivot out of the front of the robot
- Intake will be full width (relatively) of the robot
- Larry, Tom C., and Kyle discussed the pros and cons of having the balls go over or through the bumpers. Pros for a design that takes the balls over the bumpers included a simpler design that has more integrity. Pros for a drive base frame cut for the balls include a funnel that would only allow for one ball to enter the robot at a time, vastly decreasing the chance that we intake more balls than we want. Drive base cut also makes sensor placement to count the balls better. After the discussion, we decided on making a cut in the drive base frame for the intake, and the cut will be 8-9 inches wide.
Working towards a design that will extend the intake mechanism out of the frame perimeter and put it back in. Four bar design similar to 971's 2019 intake.That design would put us over the frame when the intake is stored.- Intake deploy is currently motor-driven and rotates the intake mechanism 90 degrees around a pivot point just above the frame.
- Decided on the foam roller + mecanum redirect bar design.
- Prototype is complete! Mecanums redirect the ball very well, experimented with wheel spacing, axle height from ground, mecanum axle distance from the frame perimeter, etc.
Need to do:
DECIDE OVER-THE-BUMPER OR THRU-THE-BUMPER!If THRU, determine the size of opening needed in the Drive Base.
Determine how the intake will interface with the Storage- Roller bar on top of the balls when the enter the robot from the intake, passive roller below said roller bar. Pushes balls into the helix.
- Test the interface
Test mecanum wheels (on order)Out of stock,both the 2 inch omnis and the 2 inch mecanums are on order. Omnis from AndyMark, Mecanums from WCP (on backorder, should ship this week)
Test plastic mecanum wheels (being assembled)- 1/8/20: 4/8 have been assembled thanks to Nikko, Trevor, and Cynette. Thanks guys!
- 1/9/20: Only one left that needs to be assembled.
- 1/11/20: All wheels assembled
Summarize number (and type if possible) of motor(s) needed for a full robot check.- 1/9/20: One for deploy, one for the driving of the bars.
Start to figure out what kind of sensors are needed to control the Intake and make sure we do not take in more than 5 balls.- 1/8/20: Beam break that is below the center of the balls. The balls rolling past it breaks the beam, counting the balls.
- Do scaled, dimensioned, CAD sketches to confirm we wil be within our 12" frame extension limit
1/9/20: With the help of Chris Sowden, basic CAD sketches of the two-bar intake system have been made. The current design has us behind the 12 limit.look for foam materials- 3D print more wheels
order polycarbon tubing- intake axils need to be vertically adjustable
Design
- From the prototype we got running at 1/11/2020, here are the measurements that allow for the mecanums to redirect the ball to the center
- Distance from the floor to the mecanum bar: 6.625in
- Distance from frame perimeter to the mecanum bar: 3.9375in
- Distance from frame perimeter to hot dog roller: 9.5625in
- Distance between mecanum axle to hot dog axle: 5.625in
- Distance from floor to the bottom of the bumper: 1.5in
- Distance from floor to center of handoff wheel axle: 8.125in
- Distance from frame perimeter to center of handoff wheel axle: 1.75in
- On 1/12/2020, we experimented with a different hot dog roller which gave us better results. New roller is a 1.25in in diameter roller covered in surgical tubing rubber instead of foam.
- New roller is still grippy enough to grab the balls but it's more slippery and prevents binding between the two rollers. Easier to outtake balls as well.
- 1/14/20 - 1/16/20: ran into a load of issues. Previous iteration was hitting the helix and the centered cut out couldn't handle two balls being intaked at once. Currently testing a design where the bumper cut is to the left of the robot frame if youre looking at the robot from straight on, same side as the shooter. Currently making the prototype to test this new design but waiting on more mecanum wheels to print since the last print failed. Nick V, AJ L, Chris S, Ben D, and others have all worked on the CAD for the pivot mechanism which will be run by a NEO according to our calculations. The same motor will also run the intake --> helix handoff compliance wheel (3green) in a manner similar to our 2016 scalar where the same motors were running the pivot and the movement of the telescoping arm. Lots of work to be done still.
- 3D Printed Hubs are in the left direction!


Daily Diary:
Kickoff - 1/16/2021
11:45 AM - 6:00PM (VIRTUAL)
We modified and re-ranked the priority list we made during Preseason based on the Challenges. We made general decisions on what we wanted to do to intake (including testing the removal of the hot dog bar, removing the Peace Bridge, etc.). We also established who would be leading intake, and began to divy up the work.
1/19/2021
7:00 PM - 9:30 PM (VIRTUAL)
We had a wonderful day of downloading the Robot CAD, and absolutely nothing went wrong.
We each worked on different things, with Alex F. working on the camera and ring light mount, Nicole working on the Intake plates, and Alex Leete working on the sensors.
Camera mount: We got a vision cone for the camera made and placed in the CAD to get a general idea of what the mount needs to look like.
Intake Plates: things happened????
New sensor mounts: ????
1/21/2021
7:00 PM - 9:30 PM (VIRTUAL)
We got a rough draft of the camera and ring light mounts, despite not having a 3D model of either and not even knowing what ring light we used, despite looking seemingly everywhere. The mounts are based on the 2019 ones though, so it should work (?). We also continued to do intake plate and sensor mount stuff probably?
1/23/2021
10:00 AM - 6:00 PM (IN PERSON)
We did some testing in the commons, mostly the shooter but a little bit of intake as well. There were some issues, primarily with the ball getting stuck on the transition between intake and helix, but this might be changed with the Rainbow bridge being removed? The camera mount was modified a little and approved by Roseanne, hopefully those will be printed soon (although we also want to add some adjustability to them at some point). The intake plates also had stuff done to it??? The sensor mounts were nearly finished I think.
1/26/2021
7:00 PM - 9:30 PM (VIRTUAL)
We did get the task list and wiki updated, and the sensor mounts are done (but still need to be approved and made and stuff). Nicole briefed Kadence on the intake plates since Nicole will probably be in the commons testing next meeting instead of doing CAD.
1/28/2021
7:00 PM - 9:00 PM (not 9:30 as I learned too late) (IN PERSON)
We have started making new Helix brushes so we know that the new ones aren't causing the jamming, and also to make minor improvement. Someone might have gotten a little snipper happy with one of them, but I'm sure it will be fine. And unfortunately Nicole didn't get to clean the brushes up :(. Once Nicole updates the wiki, there won't be a bunch of underscores and question marks in the following sentence I hope. We also finished the intake plates, and started _____????????
1/30/2021
1:00 PM - 6:00 PM (IN PERSON)
Today was a testing/driving day, so not much work was done. However, we did get a finished print of the Intake Camera Mount and Intake Ring Light Mount (I'm still not sure if that should be one or two words). Whatever idiot designed it didn't put any thought into how it would actually fit together, but luckily it works. Of course the camera mount still needs to be reprinted at some point, since the holes are slightly bigger than they should be, thanks to the same idiot. Thank god they aren't a subteam co-lead or drive team member or anything, just imagine if that was the case. We did use the intake while driving, and it still had trouble on the transition from intake to helix on around 1 out of every 3 balls, and someone would just have to kick it. We think it is due to the helix brushes being too short there, so hopefully after the new ones get finished and installed we won't have that problem as much.