2021:Power Cell Intake
Design Summary:
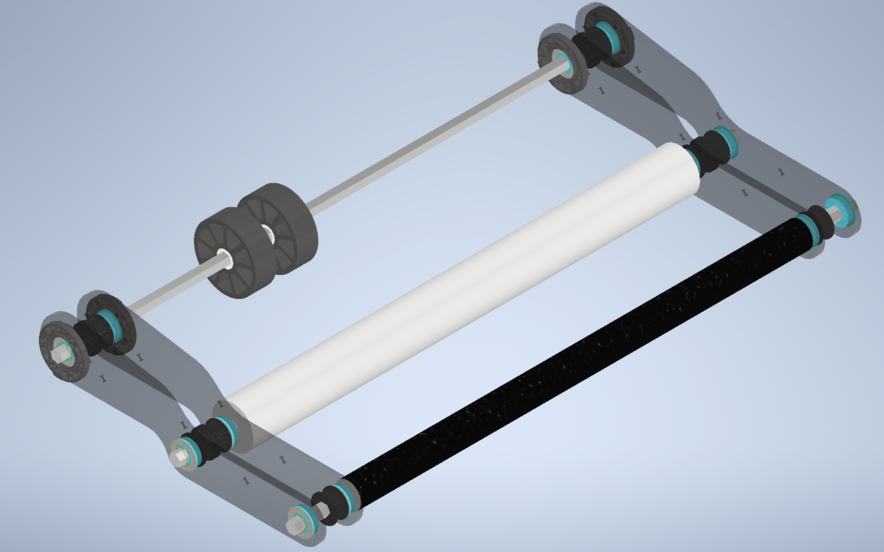
- Single roller system. A roller of 3D printed left mecanum wheels (2" diameter) pivot down to grab balls and redirect the balls along the bumper into a cut in the frame, where they are indexed by a beam break sensor that counts the balls as the enter the robot. The handoff from the intake to the helix is two compliance wheels on the same axle as the pivot that pull the balls into the helix. The rollers are powered by a NEO 550 at a 16:1 gear ratio and the pivot is powered by a NEO 550 motor at a 100:1 gear ratio.
Prototyping 1/5/2020-1/11/2020
Overview: Based on initial team brainstorming and sketching, as well as theinformation from Strategy Subteam, we determined to prototype:
- An over-the-bumper intake:
- A thru-the-bumper intake
This decision is critical as it affects Drive Base!
- Test using various componenets touching the balls:
- Test brushes
- Test wheels
- Test "hot dog roll" - a material wrapped around a rod that grips the game piece well and will snag it.
- Test mecanum wheels to direct the balls into the robot in a manner that can be counted or indexed.
- Combinations
Observations: We observed the following over the course of prototyping:
- It is not difficult to get the balls to go over the bumper.
Decisions:
- Intake will pivot out of the front of the robot
- Intake will be full width (relatively) of the robot
- Larry, Tom C., and Kyle discussed the pros and cons of having the balls go over or through the bumpers. Pros for a design that takes the balls over the bumpers included a simpler design that has more integrity. Pros for a drive base frame cut for the balls include a funnel that would only allow for one ball to enter the robot at a time, vastly decreasing the chance that we intake more balls than we want. Drive base cut also makes sensor placement to count the balls better. After the discussion, we decided on making a cut in the drive base frame for the intake, and the cut will be 8-9 inches wide.
Working towards a design that will extend the intake mechanism out of the frame perimeter and put it back in. Four bar design similar to 971's 2019 intake.That design would put us over the frame when the intake is stored.- Intake deploy is currently motor-driven and rotates the intake mechanism 90 degrees around a pivot point just above the frame.
- Decided on the foam roller + mecanum redirect bar design.
- Prototype is complete! Mecanums redirect the ball very well, experimented with wheel spacing, axle height from ground, mecanum axle distance from the frame perimeter, etc.
Design details
- From the prototype we got running at 1/11/2020, here are the measurements that allow for the mecanums to redirect the ball to the center
- Distance from the floor to the mecanum bar: 6.625in
- Distance from frame perimeter to the mecanum bar: 3.9375in
Distance from frame perimeter to hot dog roller: 9.5625in- hot dog bar is no longe rin use
Distance between mecanum axle to hot dog axle: 5.625in- hot dog bar is no longer in use
- Distance from floor to the bottom of the bumper: 1.5in
- Distance from floor to center of handoff wheel axle: 8.125in
- Distance from frame perimeter to center of handoff wheel axle: 1.75in
- On 1/12/2020, we experimented with a different hot dog roller which gave us better results. New roller is a 1.25in in diameter roller covered in surgical tubing rubber instead of foam.
- New roller is still grippy enough to grab the balls but it's more slippery and prevents binding between the two rollers. Easier to outtake balls as well.
- 1/14/20 - 1/16/20: ran into a load of issues. Previous iteration was hitting the helix and the centered cut out couldn't handle two balls being intaked at once. Currently testing a design where the bumper cut is to the left of the robot frame if youre looking at the robot from straight on, same side as the shooter. Currently making the prototype to test this new design but waiting on more mecanum wheels to print since the last print failed. Nick V, AJ L, Chris S, Ben D, and others have all worked on the CAD for the pivot mechanism which will be run by a NEO according to our calculations. The same motor will also run the intake --> helix handoff compliance wheel (3green) in a manner similar to our 2016 scalar where the same motors were running the pivot and the movement of the telescoping arm. Lots of work to be done still.
- 3D Printed Hubs are in the left direction!
- Offseason of 2020: in preparation for the upcoming competition, which we knew would require the 2020 robot, we looked at ways to improve the robot, in particular the intake. We made a list of issues with the intake, and decided that it would require large changes to improve it in a significant way. We looked at lots of successful teams in 2020 who had robot reveals that showed off their intake or competed in a Week 1 regional. We analyzed why their intakes worked as well as they did, then used that to create a list of modifications we could consider making to the intake to improve it's performance. These improvements included removing the hot dog bar, adding vertical and horizontal flex, and making the axle mounts drop down. The hope is that a combination of these changes would allow our robot to intake balls faster and more consistantly, with less balls getting stuck in the transition, bouncing off, or otherwise not going in smoothly.
- Our current layout has no hot dog bar, and the outer (?) intake blade on the left side of the robot has been removed. We have redesigned the intake blades with a better belt layout, to prevent rubbing on the bumpers. We have made several other modifications but I really can't remember.


2021 Daily Diary:
Kickoff to 1/16/2021
We modified and re-ranked the priority list we made during Preseason based on the Challenges. We made general decisions on what we wanted to do to intake (including testing the removal of the hot dog bar, removing the Peace Bridge, etc.). We also established who would be leading intake, and began to divy up the work.
1/19/2021
7:00 PM - 9:30 PM (VIRTUAL)
We had a wonderful day of downloading the Robot CAD, and absolutely nothing went wrong.
We each worked on different things, with Alex F. working on the camera and ring light mount, Nicole working on the Intake plates, and Alex Leete working on the sensors.
Camera mount: We got a vision cone for the camera made and placed in the CAD to get a general idea of what the mount needs to look like.
Intake Plates: things happened????
New sensor mounts: ????
1/21/2021
7:00 PM - 9:30 PM (VIRTUAL)
We got a rough draft of the camera and ring light mounts, despite not having a 3D model of either and not even knowing what ring light we used, despite looking seemingly everywhere. The mounts are based on the 2019 ones though, so it should work (?). We also continued to do intake plate and sensor mount stuff probably?
1/23/2021
10:00 AM - 6:00 PM (IN PERSON)
We did some testing in the commons, mostly the shooter but a little bit of intake as well. There were some issues, primarily with the ball getting stuck on the transition between intake and helix, but this might be changed with the Rainbow bridge being removed? The camera mount was modified a little and approved by Roseanne, hopefully those will be printed soon (although we also want to add some adjustability to them at some point). The intake plates also had stuff done to it??? The sensor mounts were nearly finished I think.
1/26/2021
7:00 PM - 9:30 PM (VIRTUAL)
We did get the task list and wiki updated, and the sensor mounts are done (but still need to be approved and made and stuff). Nicole briefed Kadence on the intake plates since Nicole will probably be in the commons testing next meeting instead of doing CAD.
1/28/2021
7:00 PM - 9:00 PM (not 9:30 as I learned too late) (IN PERSON)
We have started making new Helix brushes so we know that the new ones aren't causing the jamming, and also to make minor improvement. Someone might have gotten a little snipper happy with one of them, but I'm sure it will be fine. And unfortunately Nicole didn't get to clean the brushes up :(. Once Nicole updates the wiki, there won't be a bunch of underscores and question marks in the following sentence I hope. (no there are just as many, idk what we did. -Nicole) We also finished the intake plates, and started _____????????
1/30/2021
1:00 PM - 6:00 PM (IN PERSON)
Today was a testing/driving day, so not much work was done. However, we did get a finished print of the Intake Camera Mount and Intake Ring Light Mount (I'm still not sure if that should be one or two words). Whatever idiot designed it didn't put any thought into how it would actually fit together, but luckily it works. Of course the camera mount still needs to be reprinted at some point, since the holes are slightly bigger than they should be, thanks to the same idiot. Thank god they aren't a subteam co-lead or drive team member or anything, just imagine if that was the case. We did use the intake while driving, and it still had trouble on the transition from intake to helix on around 1 out of every 3 balls, and someone would just have to kick it. We think it is due to the helix brushes being too short there, so hopefully after the new ones get finished and installed we won't have that problem as much.
2/2/2021
7:00 PM - 9:30 PM (VIRTUAL)
The new sensor mounts were unfortunately not made with the sheet metal starting point, so we remade them. Roseanne had some trouble opening the updated ones, so she will check those over and they will be changed if there are any issues.
2/4/2021
7:00 PM - 9:00 PM (IN PERSON)
The new camera mount was printed with the correct size hole, and that's pretty much where the good news ends. They printed with the opening about .03 inches smaller than they should be, so when they were forced on, the mount snapped. The ring light also snapped. We tried to zip tie them but that didn't work either, so we ended up just velcroing the camera to the helix ring, and that will keep the camera on for all of 5 seconds. Even if the mount did fit, there isn't a way to actually drill the holes without having to totally remove the helix ring. In summary, a pretty major redesign of both mounts is required, so yay I guess. Now I'll pass the mic to Nicole so she can talk about what she did. take it away captain. Based on the given circumstances, I probably did something on this day, quite possibly CAD.
2/6/2021
1:00 PM - 6:00 PM (iN PERSON)
On a positive note, we finally have the intake fixed and working properly (yay!). Between removing the zip tie pushing on the ball, lengthening the brushes, and adding some stiffness to the intake, we had pretty much 0 issues testing today. In addition, both the new sensor mounts and the camera mount were addded to the Final Robot Assembly, and the camera and ring light mounts v2 started printing. Of course, programming also mentioned that they had no intention of using any camera or ring light for autonomous, so you win some you lose some I guess. Oh well ¯\_(ツ)_/¯. Meanwhile, we also did some work in the shop, but as Alex Fabrizi has no idea what they did, Nicole needs to add this information. We did things in the shop on the robot or possibly driving. -Nicole
2/9/2021
7:00 PM - 9:30 PM (VIRTUAL)
We mostly worked on submission things, so not much work was done on intake or anything. It was mostly just reading over things and making sure info is accurate and we have good pictures of everything.
2/11/2021
7:00 PM - 9:00 PM (IN PERSON)
We have a printed version of the camera mount and ring light mount, but we still need to decide if it will be used. The ring light won't be, but if Drive Team still wants the camera (alex you're drive team aux, this is your call -Nicole), we may need to use the mount. We also continued to work on the intake blades, and hopefully things happened and someone who knew what happened would be able to fill this in. We also made Harris Shop Drawings for all of the Harris parts so far.
2/13/2021
1:00 PM - 6:00 PM (IN PERSON)
During Drive Practice, we did some intake testing. We have sent out the hardstops to Harris, but obviously they haven't come back yet, so the intake was rubbing on the bumper, and actually destroying the top of the numbers. We added some tape to the bumpers, so now that is being destroyed instead of the bumpers. We also put a little bit of a pool noodle under the intake to act as a "hard" stop. As of right now, the intake is working pretty well. There was one time that we tried to intake like 3 balls at once, and two balls got stuck in the transition behind the wheel, but this was solved by outtaking. We never saw it happen again, so we just gonna assume it's all fine. There was a little bit of shop work done, but I don't think any of it was intake related.
2/17/2021
1:00 PM - 5:00 PM (IN PERSON)
We mostly worked on submission things and shooter stuff, since they are unfortunately top priority. There was a bit of intake work to do on the intake blades, we didn't have enough people there to do it. We also learned that nicole is refusing to edit the wiki >:(, and is quite frankly a dissappointment. I expect better from a team captain and mechanism lead. Her blatant disregard for the time-honored tradition of editing this wookie is disrespectful, and downright insulting. But hey, at least she wasn't 2 hours late to the meeting. (WOW -Nicole)
2/18/2021
3:00 - 9:00 PM (IN PERSON)
We primarily did submission stuff, but a little bit of intake work. We filed down the rollers on the mecanum wheels so that they would spin properly, although currently only one of them is spinning well. We also need to hot glue all the pins on the second one and and one of the pins on the first one. We also worked on (intake blades) [nicole this is your moment, you alone know what you did and it wasn't that long ago so you definitely remember it, you even have the login this time, ya just gotta put it on the wiki, i believe in you :) ].(UMMM we tested the new intake we CNCed, it turns out that I know how to do CAD and math, so it fits perfectly, yay -Nicole)
2/20/2021
1:00 - 8:00 PM (IN PERSON)
There wasn't much intake work done today. The first few hours were dedicated to Programming and Game Design. The programmers have the Galactic Search challenge pretty much down, and Intake is working perfectly there, thank god. Nevin might have done some work with the intake blades, but unless he plans on updating the wiki, who knows what he did. And since the shooter is not currently assembled, we weren't able to actually drive using the intake. We mostly spent the practice shredding the belts and running into markers, some people more than others :P. We also had to start fixing the DB.
2/23/2021
7:00-9:00 PM (IN PERSON)
We fixed the DB today, that was it. We also finally hot glued the 3" mecanum wheels, which means they should be set to put on the robot. And unfortunately, the hard stop we put on the robot was not painted, so it had to be replaced. This time, we used much shorter bolts and put them in through the bottom, so they should be much easier to put in. we also actually attached the banner sensors how they were supposed to be, so those should be working. Nicole also did other stuff with CAD, but since she only updated the wiki halfway through the meeting, she didn't put that in. This is Nicole, since you are reading this you probably understand that this was involuntary due to ALEX looking over my shoulder the whole time, do not expect this often. lol -Nicole. I expect it everytime we meet, NICOLE >:(. -Alex
2/25/2021
7:00 PM - 9:00 PM (IN PERSON)
A few things did occur. First is that we got the marker top prototype printed, and it works pretty well, if you ignore the fact that it doesn't fit. It needed to be filed down, but more skin was removed than plastic tbh. We also had to do more fun things with hard stops and sensors (....yay), in this case trying to make sure that they are parallel to the drive base frame, and still tightened down. We ended up having to use a countersunk bolt for one of the holes, since it was right next to a weld. Also, they might not be totally parallel, but in general that's done. We also had to drill an extra hole in them so the sensor would actually fit, so that's done I think. We also tried to update the intake assembly, but to be honest, we probably made negative progress on that (we literally didn't even save any of our changes by the end of the meeting). The assembly is, in fact, kinda borked. As in some things are not constrained, some things are constrained to each other when they really shouldn't be, some are just wrong, etc. That entire thing will have to be revisited on Saturday (unless Nicole wants to do some at home :D). But hey, at least we learned how to do the do-si-do.
2/27/2021
1:00 PM - 6:00 PM (IN PERSON)
Nothing happened today, we worked on game design the whole time. Take that Alex, I edited the woookie.
3/2/2021
7:00 PM - 9:00 PM (IN PERSON)
More game design things, although that prototype marker finally fits. yeah and now i have to go and edit your entry cause you were too lazy to put in the work >:(. and you still havent put in the entry for 3/4, even though you said you would :( (although i do kinda forgive you cause you gettin vaccine stuff and you did say you would get it done today :D)
3/4/2021
7:00 PM - 9:00 PM (IN PERSON)
We mostly just worked on the intake assembly in inventor. The original was just so broken with the constraints either missing or broken so we just restarted with a new one, which is currently in progress. No practice happened unfortunately, and no other intake stuff happened (although we do need to get started on a backup intake assembly at some point).
3/6/2021
1:00 PM - 6:00 PM (IN PERSON)
Today I fixed the intake assembly that was originally broken. I redid it all and got Nick to work on the final touches. I'm not sure if it has been added to the final robot assembly but if not that is one of the last steps. Then we can finally install the correct one onto the robot! YAY! -Nicole Thank you for doing the wiki :D -Alex
3/9/2021
7:00 PM - 9:00 PM (IN PERSON)
More drive practice, aka destroying markers and shredding belts, so that was fun. Roseanne and Nevin did start on making the spare intake assembly, but I don't believe they finished. We also discovered on Monday after Nicole called me a buddy that the intake assembly in Inventor was incredibly broken and will need to be fixed at some point.
3/11/2021
7:00 PM - 9:00 PM (IN PERSON)
We fixed the drive base belts (again), and finished in record time (coincidentally everything went smoothly as soon as Nicole stopped working on it :thinking:). We also destroyed another marker but that isn't really intake related. Nevin and Roseanne might have continued to work on the intake assembly but I wouldn't know.
3/13/2021
1:00 PM - 6:00 PM (IN PERSON)
We have put the new intake on the robot, which has the store-bought mecanum wheels and the 3" mecanum wheels as the transition. We also (I think) now have the intake assembly that was on the robot before as a backup assembly. It was tested while programming was working on auto, and seemed to work pretty well. Nothing got jammed or stuck or anything. Hopefully we won't have as many issues with it from now on. We still need to update the assembly in Inventor, but since a) it's already on the robot and b) Nicole will probably be doing interview prep, that probably won't be a huge priority.
3/16/2021
7:00 PM - 9:00 PM (IN PERSON)
We were going to do drive practice that didn't happen cause Board of Ed. so instead we did presentation stuff. No intake stuff happened. Nicole said she would update the wiki but I haven't seen that happen yet >:(.
3/18/2021
7:00 PM - 9:00 PM (IN PERSON)
After we played vertical chess, we didn't really do much for a bit. We eventually practiced a bit, finally using the shooter after like 5 weeks without it. Intake worked fine with no complaints, everything seems ok. We had been having an issue with the Helix just spinning randomly while driving even when the Aux controller wasn't even out, but it didn't happen today, so hopefully it's no longer a problem. Nicole has also once again failed to add Nicole Test™ SOPs, but I can kinda understand cause Dean's List is kind of a lot.
3/20/2021
1:00 PM - 6:00 PM (IN PERSON)
Once again, the only thing happening was programming. Intake worked well for them, with no issues as far as I know. The only problems I've been seeing are ball counter issues, but that's a programming thing. Meanwhile, we practiced the presentation for about an hour then talked or did nothing for the rest of the time (at least as of 4:46 PM).
3/23/2021
7:00 PM - 9:00 PM (IN PERSON)
More drive practice! Also like an hour of presentation prep but also drive practice! I mean who needs to practice interview, just say words and answer question and done, ezpz. Why is so hard? During drive practice, besides realizing that one of the things on the shooter was broken and breaking a traction wheel, we also polished the bumper with the intake. We added some velcro to the hard stop to hopefully prevent that from happening again. Otherwise, everything worked pretty well (at least intake-wise, let's not talk about the shooter).
3/25/2021
7:00 PM - 9:00 PM (IN PERSON)
The broken traction was fixed with a few delays, but we did not do drive practice. Programmers did stuff, presenteres practiced a bit, that was it. I don't believe intake or helix was ever even touched today.
3/27/2021
1;00 PM - 6:00 PM (IN PERSON)
I think we just did such a good job on the intake that we just don't really need to work on it anymore. It seems to be working great and everything, we haven't really encountered any issues with it beside some programming stuff. We did a bit of Interstellar Accuracy Challenge stuff and I didn't see any issues, so I'm pretty happy with that.
3/28/2021
1:00 PM - 6:00 PM (IN PERSON)
We really just did auto testing. The only thing of note that happened was when we briefly did some IAC and ran into some balls too fast, and then they got stuck at the top of the helix. It never happened again and it seems like it can be prevented with careful driving so cool.
3/29/2021
1:00 PM - 6:00 PM (IN PERSON)
More auto stuff. Nothing of note happened with intake. We did finally finish the last of our interviews, so hopefully people will stop complaining about me not doing any interviews every meeting.
3/30/2021
1:00 PM - 6:00 PM (IN PERSON)
We did some Interstellar Accuracy and Power Port challenge stuff, which means intake was actually pretty heavily used. We generally didn't have much trouble, if you ignore the part where we shredded a helix brush and got the hairs all over the inside of the helix and on the ground. We also occasionally had some trouble with two power cells getting intook? at the same time and getting stuck, and just general jamming, but nothing that couldn't easily be fixed by going one at a time or just outtaking.
3/31/2021
1:00 PM - 6:00 PM (IN PERSON)
We did not use intake at all today, we just did Hyperdrive and AutoNav, which means I had nothing to do :(.
4/1/2021
1:00 PM - 6:00 PM (IN PERSON)
We drove the moon today. Then I forced Alex to not update the wiki, it was kinda crazy. We have done nothing, auto be like brrrrr crunch wham splat. But maybe we'll get to do some fun actual driving that would be insane. -Nicole
what nicole said -Alex
4/3/2021
1:00 PM - 6:00 PM (IN PERSON)
We did the stuff that we said we would, aka bounce, slalom, and Interstellar Accuracy, although no power port. We had a few issues with jamming in the intake, but nothing that couldn't be solved with a little outaking. We also had a bolt randomly fall out of one of the churro tubes, so yeah. There might have also been an issue with the hardstop or something? but nicole fixed that so idk. Maybe if Nicole updated the wiki she could add some more information here.