2011:Robot Design Details: Difference between revisions
From 1511Wookiee
Jump to navigationJump to search
Mechanical2 (talk | contribs) No edit summary |
Mechanical1 (talk | contribs) No edit summary |
||
| Line 15: | Line 15: | ||
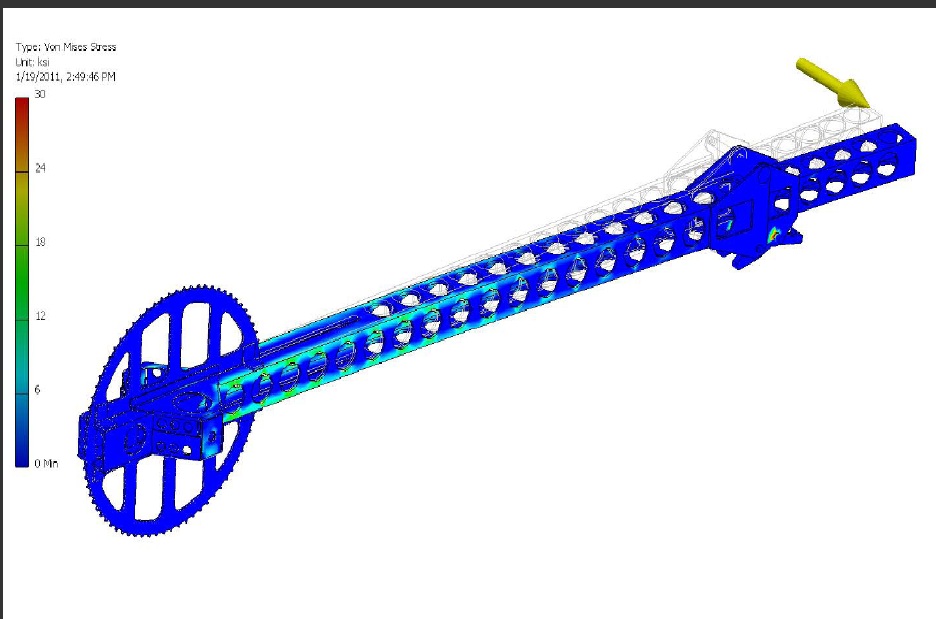
*>[[Image:Arm fea stress side load.jpg]] | *>[[Image:Arm fea stress side load.jpg]] | ||
picture: 100 side load | picture: FEA stress analysis of arm with 100 lb side load | ||
[[Image:Orginal concept and space allocation layout sketch.jpg]] | [[Image:Orginal concept and space allocation layout sketch.jpg]] | ||
| Line 21: | Line 21: | ||
<br> | <br> | ||
picture: orginal concept | picture: orginal concept and space allocation layout sketch of robot and arm | ||
[[Image:Inventor picture.jpg]] | [[Image:Inventor picture.jpg]] | ||
picture: whole robot design at the moment. using folding arm | picture: whole robot design at the moment. using folding arm | ||
<br>'''Main Goals:''' | <br>'''Main Goals:''' | ||
Revision as of 19:13, 26 January 2011
Main Robot Design
Drivetrain Design
Main Goals:
Arm Design
- >

picture: FEA stress analysis of arm with 100 lb side load

picture: orginal concept and space allocation layout sketch of robot and arm

picture: whole robot design at the moment. using folding arm
Main Goals:
Gripper Design
Main Goals:
Minibot Design
Main Goals:
Minibot Deployment Design
Main Goals:
Hostbot Electrical
- Drivetrain: (2) CIM Motors + (2) Jaguar Speed Controllers