2011:Robot Design Details: Difference between revisions
From 1511Wookiee
Jump to navigationJump to search
Mechanical2 (talk | contribs) No edit summary |
No edit summary |
||
| Line 3: | Line 3: | ||
== Drivetrain Design == | == Drivetrain Design == | ||
** | *6-wheel Drive | ||
*2 motors | |||
*all wheels driven with chains | |||
*center wheels grippy tread | |||
*outer wheels are omni | |||
'''Main Goals:''' | '''Main Goals:''' | ||
Latest revision as of 09:47, 31 January 2011
Main Robot Design
Drivetrain Design
- 6-wheel Drive
- 2 motors
- all wheels driven with chains
- center wheels grippy tread
- outer wheels are omni
Main Goals:
Arm Design
- >
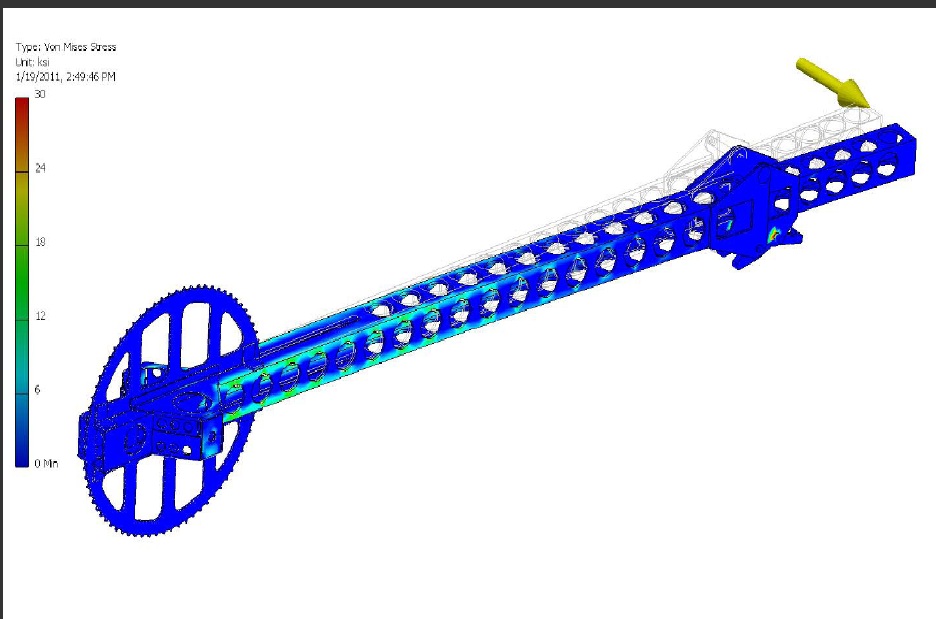

picture: FEA stress analysis of arm with 100 lb side load

picture: orginal concept and space allocation layout sketch of robot and arm

picture: robot with folding arm
Main Goals:
Gripper Design
Main Goals:
Minibot Design
Main Goals:
Minibot Deployment Design
Main Goals:
Hostbot Electrical
- Drivetrain: (2) CIM Motors + (2) Jaguar Speed Controllers