2019:Controls: Difference between revisions
No edit summary |
No edit summary |
||
| Line 1: | Line 1: | ||
<div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"> | <div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"> | ||
| | ||
<div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"> | <div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"><div class="mw-parser-output"> | ||
| Line 8: | Line 8: | ||
== Not Started == | == Not Started == | ||
</div> <div class="mw-parser-output"> | </div> <div class="mw-parser-output"> | ||
== In Process | == In Process == | ||
</div> </div> </div> </div> </div> </div> </div> </div> | |||
== Completed == | |||
</div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> | </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> | ||
= Useful Links = | = Useful Links = | ||
| Line 278: | Line 278: | ||
*[[2010:Electrical_Controls]] | *[[2010:Electrical_Controls]] | ||
*[[2009:Electrical_Controls]] | *[[2009:Electrical_Controls]] | ||
</div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> | </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div> </div></div></div></div></div></div></div> | ||
</div> </div></div></div></div></div></div></div> | </div> | ||
</div> | </div> | ||
Revision as of 17:31, 8 January 2019
Overall Concept
To do
Not Started
In Process
Completed
Useful Links
- Subteam Student/Mentor Photos
- Zero Delay USB Joystick Encoder
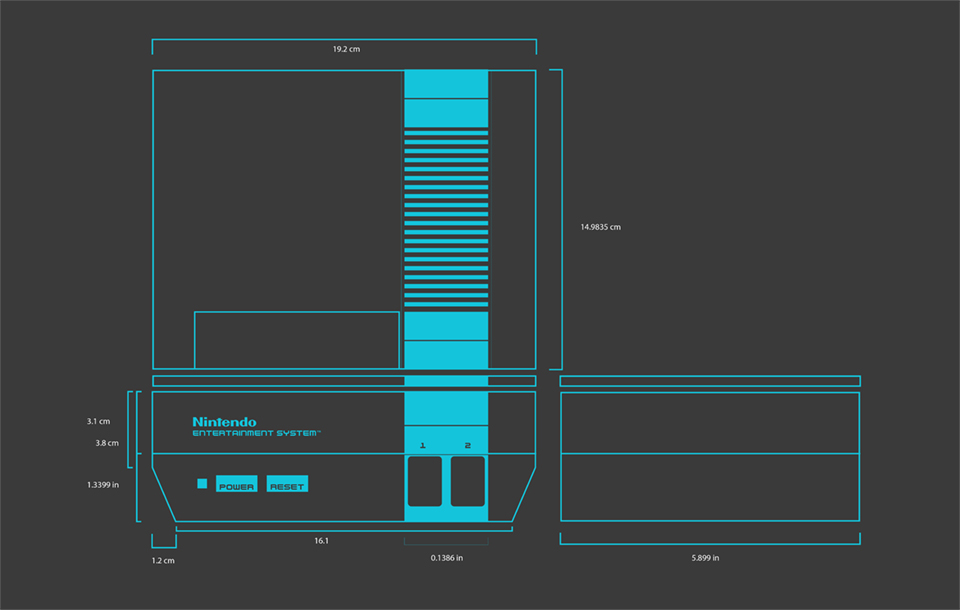
- http://exposantana.com/img/nes-measurements.jpg
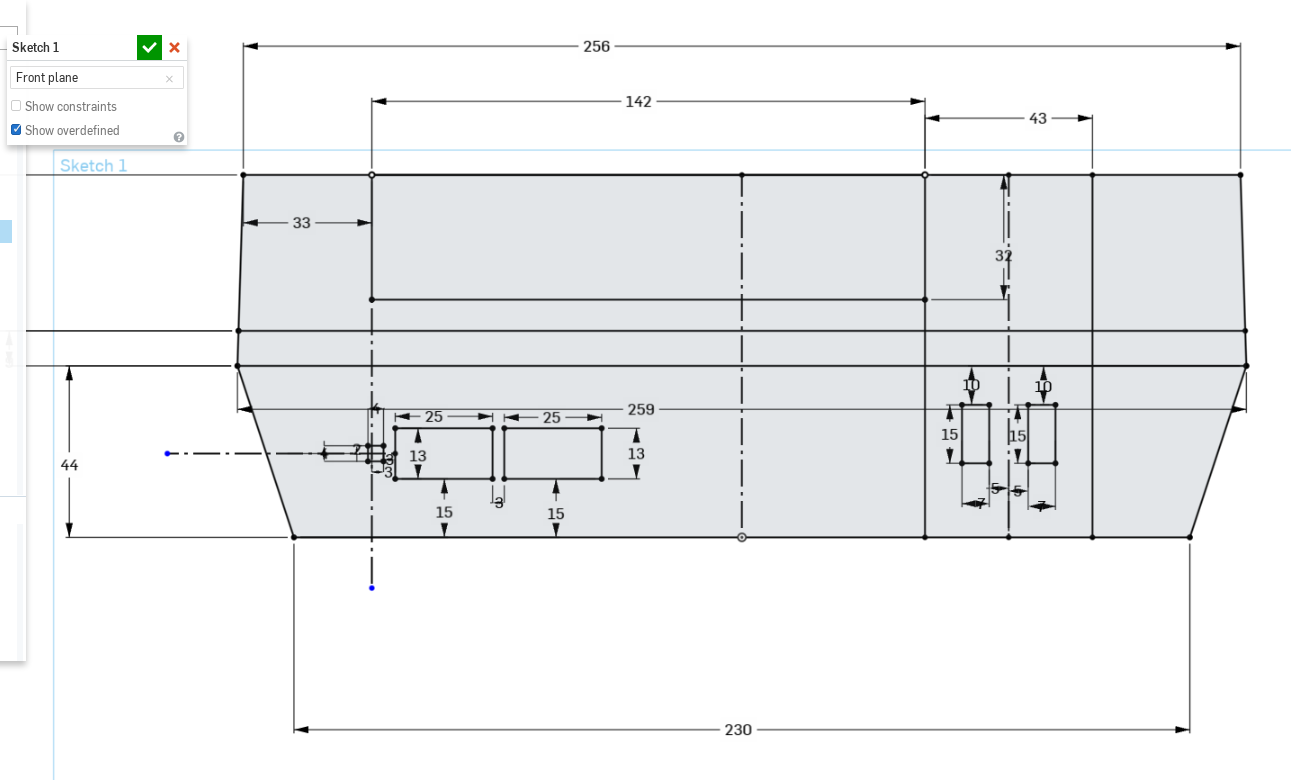
- https://ibin.co/2pzZhDM2hmF8.png
- https://grabcad.com/library/nintendo-entertainment-system
- http://www.jetpress.com/Products.aspx/bwejaatthl/30Series-SpringClawLatch/
{kind=link}
{kind=link}
PSoC Install (for lights)
PSoC Creator IDE
Download latest "PSoC Creator" from Cypress (http://www.cypress.com/products/psoc-creator-integrated-design-environment-ide) and install it (use Typical install; at end run Updater and maek sure you have the latest stuff)
For user name and password, you can use: mailme@mailinator.com mailme123
Toolkits and Board Driver Install
Get controls2018 from SVN
Run: vcredist_x86.exe
Run: USBSerialSDKSetup.exe (do Typical install; at end run Updater and maek sure you have the latest stuff)
Run: CY8CKIT04942xxSetupOnlyPackage_revSA.exe (do Typical install; at end run Updater and make sure you have the latest stuff)
While you press and hold the SW1 Prog button on the cypress board, plug in the USB cable to the PC (it will take a while for it to install 5 drivers).
Build/Program
Open PSoC Creator (Start -> Programs -> Cypress -> PSoC Creator -> PSoC Creator)
Open project: File -> Open -> Project/Workspace; then browse to Desktop/FRC2018/controls2018/SCB_Bootloader/SCB_Bootloader.cywrk)
Build project: Build -> Build All Projects
While you press and hold the SW1 Prog button on the cypress board, plug in the USB cable to the PC
Download Boot Loader:
- open programmer: Tools -> Bootloader Host
- set 'File' to C:\Users\Robotics\Desktop\FRC2018\controls2018\SCB_Bootloader\Bootloadable Blinking LED.cydsn\CortexM0\ARM_GCC_541\Debug\Bootloadable Blinking LED.cyacd
- select the com port for the cypress board
- set Baud to 115200; Data Bits 8; Stop Bits 1; Parity None
- download program: Actions -> Program
Meeting Minutes
1/8
Attendees:
Work Completed:
1/9
Attendees:
Work Completed:
1/10
Attendees:
Work Completed:
1/12
Attendees:
Work Completed:
1/13
Attendees:
Work Completed:
1/15
Attendees:
Work Completed:
1/16
Attendees:
Work Completed:
1/17
Attendees:
Work Completed:
1/19
Attendees:
Work Completed:
1/20
Attendees:
Work Completed:
1/22
Attendees:
Work Completed:
1/23
Attendees:
Work Completed:
1/24
Attendees:
Work Completed:
1/26
Attendees:
Work Completed:
1/27
Attendees:
Work Completed:
1/29
Attendees:
Work Completed:
1/30
Attendees:
Work Completed:
1/31
Attendees:
Work Completed:
2/2
Attendees:
Work Completed:
2/3
Attendees:
Work Completed:
2/5
Attendees:
Work Completed:
2/6
Attendees:
Work Completed:
2/7
Attendees:
Work Completed:
2/9
Attendees:
Work Completed:
2/10
Attendees:
Work Completed:
2/12
Attendees:
Work Completed:
2/13
Attendees:
Work Completed:
2/14
Attendees:
Work Completed:
2/16
Attendees:
Work Completed:
2/17
Attendees:
Work Completed:
Controls Rules
8.10 OPERATOR CONSOLE
R95. The DRIVER Station software provided on the National Instruments website is the only application permitted to specify and communicate the operating mode (i.e. Autonomous/Teleoperated) and operating state (Enable/Disable) to the ROBOT. The DRIVER Station software must be revision 19.0 or newer. Teams are permitted to use a portable computing device of their choice (laptop computer, tablet, etc.) to host the DRIVER Station software while participating in competition MATCHES.
R96. The OPERATOR CONSOLE, the set of COMPONENTS and MECHANISMS used by the DRIVERS and/or HUMAN PLAYER to relay commands to the ROBOT, must include a graphic display to present the DRIVER Station diagnostic information. It must be positioned within the OPERATOR CONSOLE so that the screen display can be clearly seen during Inspection and in a MATCH.
R97. Devices hosting the DRIVER Station software must only interface with the Field Management System (FMS) via the Ethernet cable provided at the PLAYER STATION (e.g. not through a switch). Teams may connect the FMS Ethernet cable to their DRIVER Station device directly via an Ethernet pigtail, or with a single-port Ethernet converter (e.g. docking station, USB-Ethernet converter, Thunderbolt-Ethernet converter, etc.). The Ethernet port on the OPERATOR CONSOLE must be easily and quickly accessible. Teams are strongly encouraged to use pigtails on the Ethernet port used to connect to the FMS. Such pigtails will reduce wear and tear on the device’s port and, with proper strain relief employed, will protect the port from accidental damage.
R98. The OPERATOR CONSOLE must not
A. be longer than 60 in. (~152 cm)
B. be deeper than 14 in. (~35 cm) (excluding any items that are held or worn by the DRIVERS during the MATCH)
C.Extend more than 6 ft. 6 in. (~198 cm) above the floor
D. attach to the FIELD (except as permitted by G19)
There is a 54 in. (~137 cm) long by 2 in. (nominal) wide strip of hook-and-loop tape (“loop” side) along the center of the PLAYER STATION support shelf that should be used to secure the OPERATOR CONSOLE to the shelf, per G15. See the PLAYER STATION section for details. Please note that while there is no hard weight limit, OPERATOR CONSOLES that weigh more than 30 lbs. (~13 kg.) will invite extra scrutiny as they are likely to present unsafe circumstances.
R99. Other than the system provided by the FIELD, no other form of wireless communications shall be used to communicate to, from, or within the OPERATOR CONSOLE. Examples of prohibited wireless systems include, but are not limited to, active wireless network cards and Bluetooth devices. For the case of the FIRST Robotics Competition, a motion sensing input device (e.g. Microsoft Kinect) is not considered wireless communication and is allowed.
R100.OPERATOR CONSOLES shall not be made using hazardous materials, be unsafe, cause an unsafe condition, or interfere with other DRIVE TEAMS or the operation of other ROBOTS.