2012:Robot Design Details
From 1511Wookiee
Jump to navigationJump to search
Current Design
- Pictures of robot:
Preliminary Design
Preliminary design after Sunday January 8th Design Sessions
-Drivetrain - 6 Wheel Pnuematic
-Collectors to prototype
-Stationary Beater Bar -Actuator Beater Bar and Wings -Hungry Hungry Hippos -U Shaped Brush
-Bridge Actuators to prototype
-Actuator also acts as collector -actuator is seperate from collector
-Storage will be 3 stage
-Shooter will be a turret
-Spinning wheels to shoot -Need backspin on ball -Variable Speed -Variable angle (could be speed) -Need to shoot over 60ft.
Robot Specifications
Overall:
- Time from collection to shooting should be less than 2 seconds.
- The direction that the balls leave the robot must be opposite from the side of the robot that collects the balls.
- All designs need to be robust so that time spent fixing the robot is to a minimum.
- All parts should be easily serviced if needed.
Shooter:
- Must be consistent within 2 degrees of the hoop when shooting from the key.
- Range must be from at least the barrier of the far zone to the basket.
- Must be able to shoot over 60 inch obstacles.
- Desired to have a design conducive to a automated aiming system.
- Time between command to fire and ball firing must be less than 0.5 seconds.
Storage:
- Must have ability to queue balls to get them ready to fire as soon as possible.
- Must have sensors to detect ball movement through the system.
- Must be able to remove balls from the system when the robot is turned off.
- Speed of transit must satisfy combined collection to shoot time of 2 seconds.
Collector:
- Must be able to be turned off and on quickly.
- Must be able to pick up balls that are located on the wall of the court easily.
- Must be able to pick up a ball when in contact with the collector and immediately (<0.2 seconds) pass it to the storage system.
Bridge Articulator:
- Must be able to exert enough force to lower the bridge to the point where the drive train can easily get on the bridge.
- Needs to be able to take the abuse of another robot or force resisting the motion of putting down the bridge.
- Must be able to manipulate the bridge from horizontal to drive over position in less than 1 second.
- It would also be useful to have the articulator assist in ball collection.
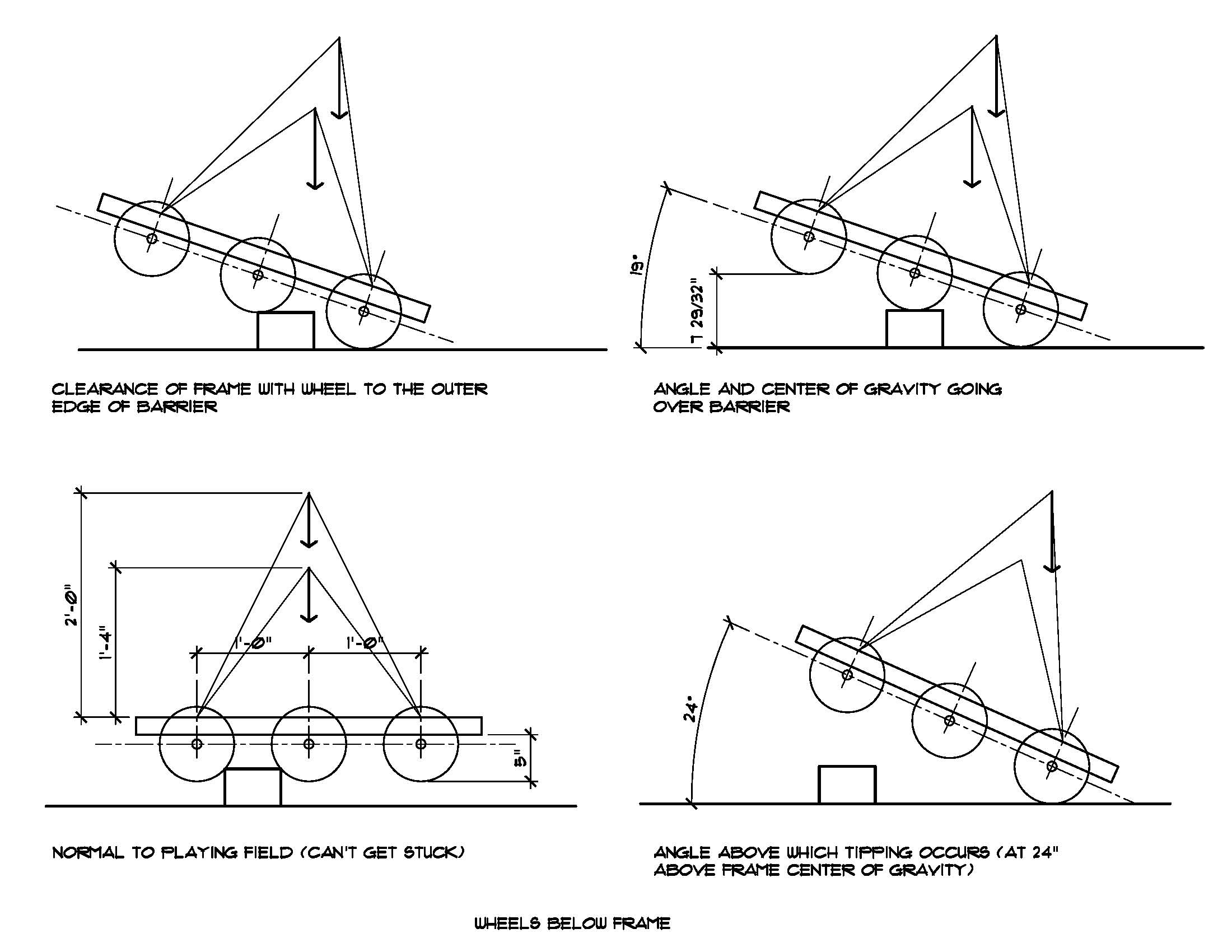
Drivetrain:
- Must be able to easily transverse the barrier and bridges in less than 2 seconds.
- Max Drivetrain speed should be between 10 to 11ft/s.
- Drivetrain must have slow mode for fine control on bridges and barriers.
- Sketches for frame height/wheel base can be found here and here.
{kind=link}
{kind=link}